Purpose
Design and develop autonomous vehicle motion control and payload transfer system.
Results
Functional vehicle prototype, incorporating image processing, PID-based motor control system and ultrasonic proximity sensors.
The technology as well as the market for autonomous and semi-autonomous vehicles is in a rapid state of expansion with no foreseeable end in sight. From safety features and self driving in cars to drones, the possibilities seem endless.
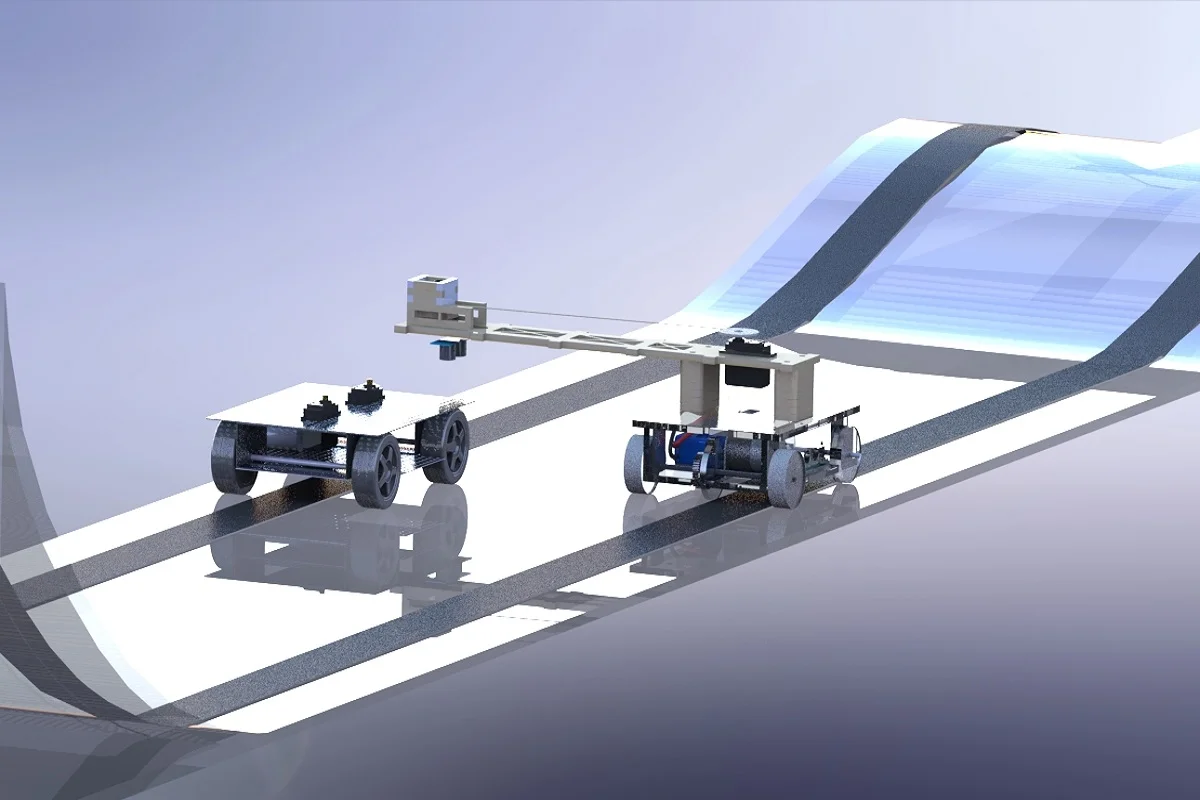
The aim of this project was expand the idea of shipping drone by designing and building a wheeled vehicle that could autonomously carry a payload to one of a shipping drone that could also autonomously track another independently controlled vehicle and then autonomously transfer its payload as well.
The first step of the project was the design and development of all mechanical components, including chassis, drivetrain, and payload transfer mechanisms.
The receiving vehicle was a lightly modified RC car, while the tracking vehicle was built from the ground up. The decision was made to make the majority of the car out of acrylic, a material that offered a good balance of weight and strength and could also be quickly cut using a laser cutter. The drivetrain consisted of an electric motor connected by custom gears to the drive axle and controlled by a motor controller. All parts were designed to be modular and quickly disassembled and modified or replaced,
The final transfer mechanism consisted of a rigid arm extending laterally with a payload holding basket at the end, designed to relief its contents when over the receiving vehicle. In order to further reduce weight, wood was used to build the structure of the transfer arm.

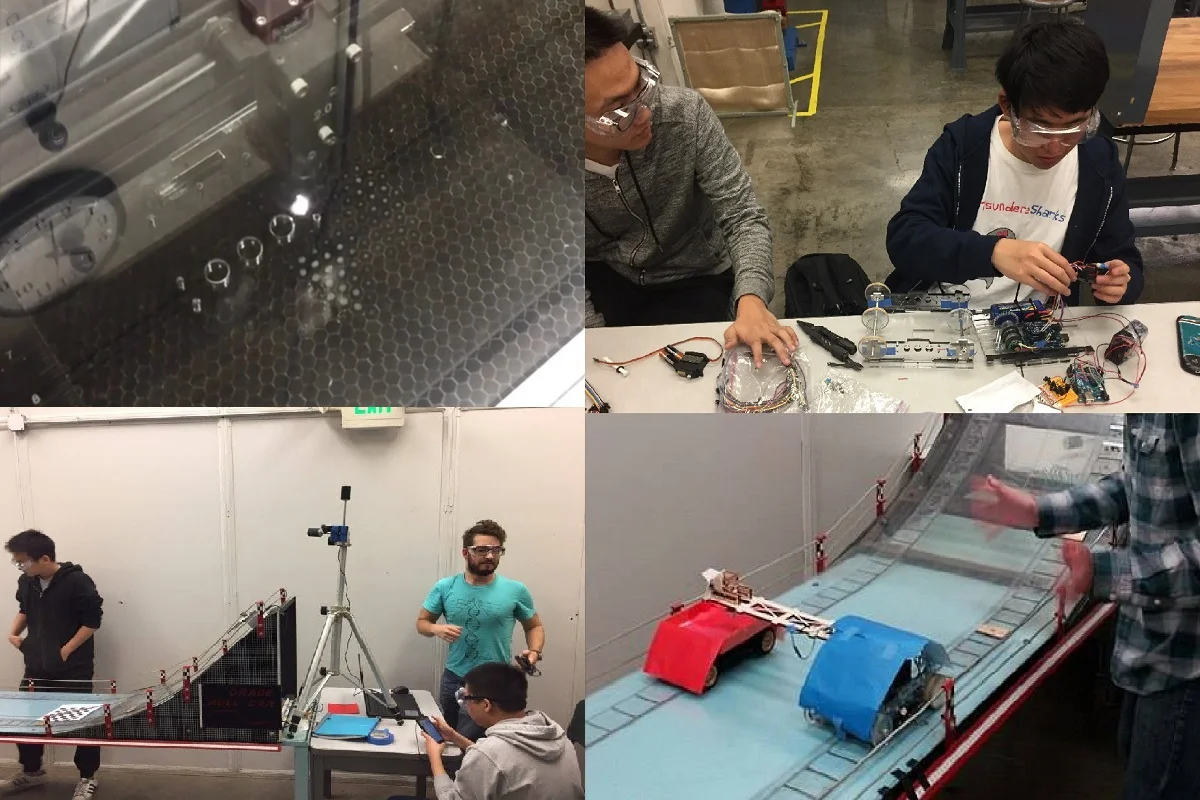
A color tracking graphical analysis system with an externally positioned camera was used to control the vehicle's motion tracking, chosen over proximity sensors such as IR and ultrasound due to its greater working range. Video imaging from the camera was fed back into a Matlab based program that analyzed the positions of the two vehicles and worked to close that distance using a Simulink based PID control program. An ultrasound sensor was placed on the transfer mechanism to trigger its payload drop over the receiving vehicle. In order to simulate diverse operational environments, the vehicles were tested on a sloping track.
The testing process revealed the need for modifications. From a mechanical perspective, the gearing mechanism was modified to increase maximum velocity and the wheels were widened to increase traction. From a control standpoint, the control programming was modified to ensure voltage provided to the motor always exceeded baseline required to generate breakaway torque. The system worked as designed after modifications were made.
Lessons learned from this project included the importance of rapid manufacturing and the ability to efficiently modify prototypes during testing. In addition, many controller tuning and testing processes had to be held on standby while mechanical fabrication processes were completed, pointing to potential improvements in project management, specifically timing and allocation of team resources.